
Veguhestina destî - arîkariya robotîkî
Contains
Ger di amûrê wê de veguhastinek tune be her gerîdeyek nûjen dê nikaribe bi rihetî dest pê bike û biçe. Ro, cûrbecûr cûrbecûr gearbox-ê hene, ku ne tenê dihêlin ku şofêr vebijarka ku li gorî behreyên wî yên materyal guncaw e hilbijêre, lê di heman demê de gengaz dike ku ji ajotina wesayîtê rehetiya herî zêde bistîne.
Bi kurtahî di derbarê celebên sereke yên veguhastinê de di ve hatî vegotin review cuda... Let'scar ka em bi hûrgulî li ser binexşînin ka kîjan qutikê gear robotîk e, cûdahiyên wê yên sereke ji qutikê desta, û her weha bingeha xebata vê yekeyê jî bifikirin.
Gearboxek robotîk çi ye
Operasyona gearbox-ê ji bilî hin taybetmendiyên hema hema wekhevî ya analogê mekanîkî ye. Di cîhaza robot de gelek beş hene ku guhertoya mekanîkî ya qutiyê jixwe ji her kesî re naskirî pêk tê. Cûdahiya sereke di navbera yekê robotîk de ev e ku kontrola wê ji celebek mîkroprocesor e. Di nav gearboxên weha de, li gorî daneyên ji sensorên motor, pedala gazê û teker ve li gorî elektronîkî veguheztina gear tê kirin.

Di heman demê de ji qutiyek robotîk re dibe ku were gotin makîneyek otomatîk jî, lê ev navek çewt e. Rastî ev e ku veguhastina otomatîkî pir caran wekî têgehek gelemperî tête bikar anîn. Ji ber vê yekê, ji heman guhertorê re moda otomatîkî ya ji bo guheztina rêjeyên alavê heye, lewma ji bo hinekan jî otomatîk e. Bi rastî, robot di avahî û bingeha xebitandinê de nêzîkê qutiyek mekanîkî ye.
Li derveyî, ne gengaz e ku meriv veguherînek desta ji veguherînek otomatîkî veqetîne, ji ber ku dibe ku ew xwedan hilbijêr û laşek yeksan bin. Hûn dikarin veguhastinê tenê dema ku wesayît ajotinê kontrol bikin. Her celeb yekînek taybetmendiyên xweyên xebatê hene.
Armanca sereke ya veguhastina robotkî ew e ku ajotin wekî ku mimkun e hêsantir be. Theofêr ne hewce ye ku bixwe geran biguhezîne - yekîneya kontrolê vî karî dike. Ji bilî rehetiyê, hilberînerên veguheztina otomatîk hewl didin ku hilberên xwe erzantir bikin. Todayro, robot piştî mekanîzmayê celebê herî budceyî yê gearboxê ye, lê ew rehetiya ajotinê ya wusa wekî variator an otomatîkî peyda nake.
Prensîbê qutikê gerdûnî ya robotîk
Veguhestina robotîk dikare bixweber an nîv-otomatîkî ber bi leza paşîn ve biçe. Di rewşa yekem de, yekeya mîkroprocesor ji sensoran sinyalan werdigire, li ser bingeha ku algorîtmaya ji hêla çêker ve hatî bername kirin ve tête pêxistin.
Piraniya gearboxên bi hilbijarkek destû ve têne çêkirin. Di vê rewşê de, dê leza hê jî jixweber vedibe. Tenê tiştek ev e ku ajokar dikare serbixwe îşaretekê bide kêliya veguheztina alavê jor an jêrîn. Hin veguheztinên otomatîkî yên celebê Tiptronic xwedî prensîbek bi vî rengî ye.
Ji bo zêdekirin an kêmkirina leza, ajokar leverê hilbijêrê ber bi + an ber bi - ve dibe. Bi saya vê vebijarkê, hin kes ji vê veguhastinê re rêzikî an rêzeyî dibêjin.
Sindoqa robotîkî li gorî şemaya jêrîn dixebite:
- Driverofêr brakê dixe, motorê dide dest pê kirin û leverê hilbijêrê moda ajotinê ber bi pozîsyona D ve dibe;
- Sinyala ji yekeyê diçe yekeya kontrola qutiyê;
- Bi moda bijartî ve girêdayî, yekîneya kontrolê algorîtmaya guncan a ku li gorî wê yekîne dê bixebite çalak dike;
- Di pêvajoya tevgerê de, sansor di derheqê leza wesayîtê de, di derbarê barkirina yekeya hêzê de, û her weha di derbarê moda gearbox-a heyî de, ji "mejiyê robotê" re îşaretan dişînin;
- Hema ku nîşander rawestin ku bi bernameya ji kargehê hatî sazkirin re têkildar in, yekeya kontrolê ferman dide ku li cîhazek din biguhere. Ev dikare bibe an zêdebûn an kêmbûna leza.
Gava ku ajokarek bi mekanîzmayê li gerîdeyê siwar dibe, divê ew bi wesayîta xwe bifikire da ku wextê ku bizivire leza din diyar bike. Di analogek robotîkî de, pêvajoyek wekhev pêk tê, tenê ajokar ne hewce ye ku bifikire ku kengê lengerê biguhezîne pozîsyona ku tê xwestin. Di şûna wê de, mîkroprocesor wê dike.
Pergalê ji hemî sensoran hemî agahdariyê dişopîne û ji bo barkêşek taybetî alavê çêtirîn hilbijêre. Ji ber ku elektronîk dikare geran biguherîne, veguherînek çalakvanek hîdromekanîkî heye. Di guhertoyek gelemperî de, li şûna hîdromekanîkî, ajokarek elektrîkî an ajokarek servo tê saz kirin, ku qutîkê di qutîkê de girêdide / qut dike (bi awayê, ev çend dişibiya wê bi gearboxa otomatîkî re heye - qiloç ne li cîhê ku di veguhastina destan de ye, ango nêzîkê firîn, lê li xanî bixwe ye dezgeh).
Dema ku yekîneya kontrolê îşaretekê dide ku dem dema veguheztina bi leza din e, yekem servo ajokera elektrîkî (an hîdromekanîkî) yekem çalak dibe. Ew rûkên tevlihevkirina kelûmêlê vedihewîne. Servoya duyemîn wê gavê di mekanîzmayê de geran digire û digihîne rewşa xwestek. Dûv re ya yekem hêdî hêdî qulikê berdide. Vê sêwiranê dihêle ku mekanîzma bêyî beşdariya ajokar bixebite, ji ber vê yekê, mekîneyek bi veguhastina robotîkî re pêla qiloçê nîne.

Gelek qutiyên hilbijêr xwedî helwestên alavên zorê ne. Vê yekê ku jê re tê gotin tiptronic dihêle ku ajokar bi rengek serbixwe dema gûhertina bi leza mezintir an nizmtir kontrol bike.
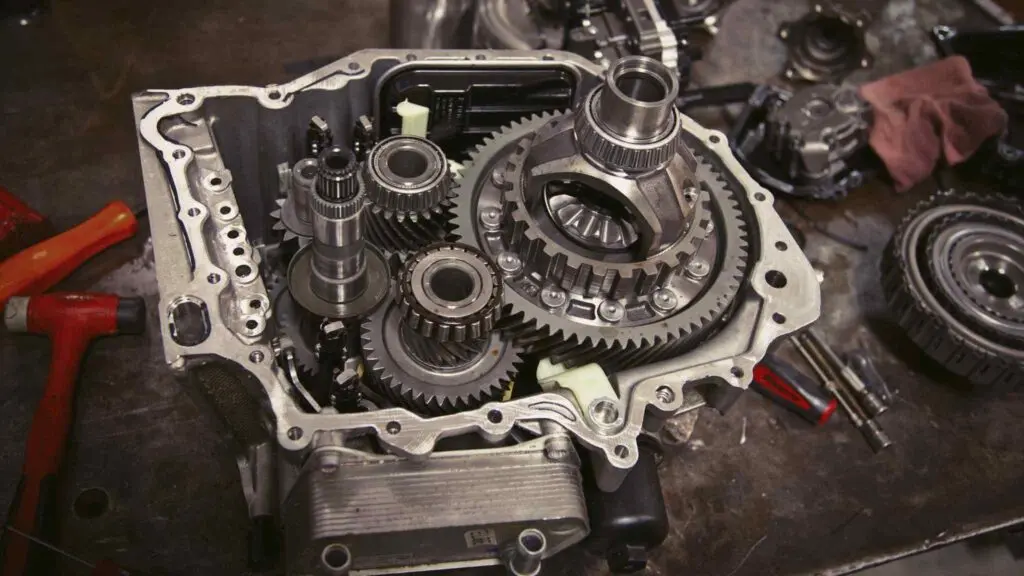
Amûra qutiya gearboxê
Todayro, ji bo otomobîlên rêwîtiyê gelek celeb veguheztina robotîk hene. Dibe ku ew di hin aktuatoran de ji hevûdu cûda bibin, lê beşên sereke wekhev dimînin.
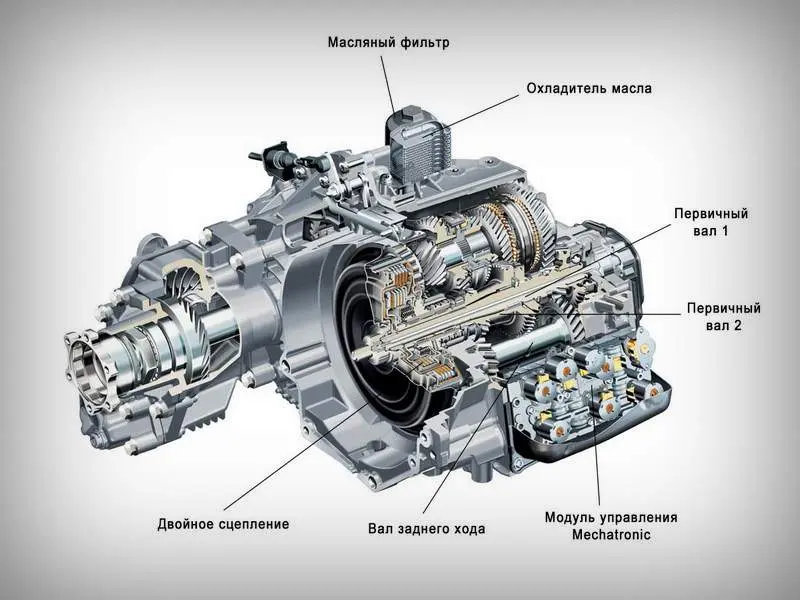
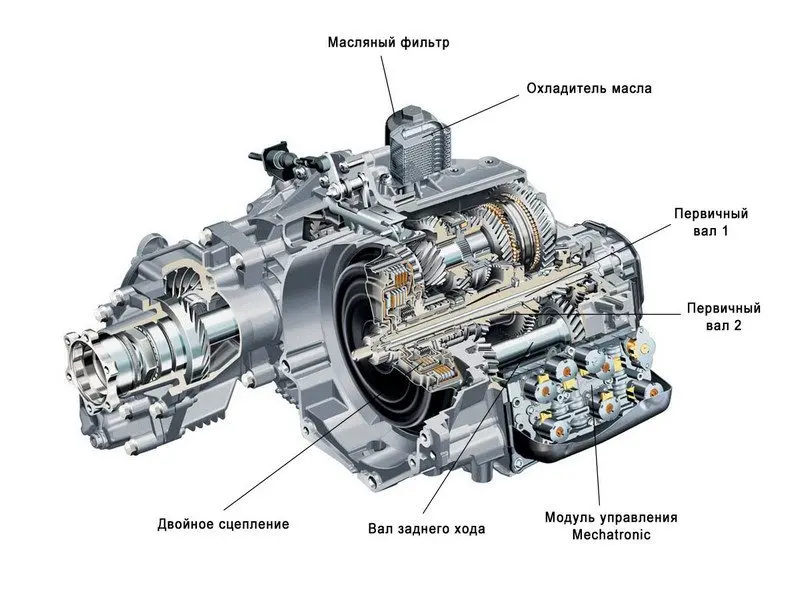
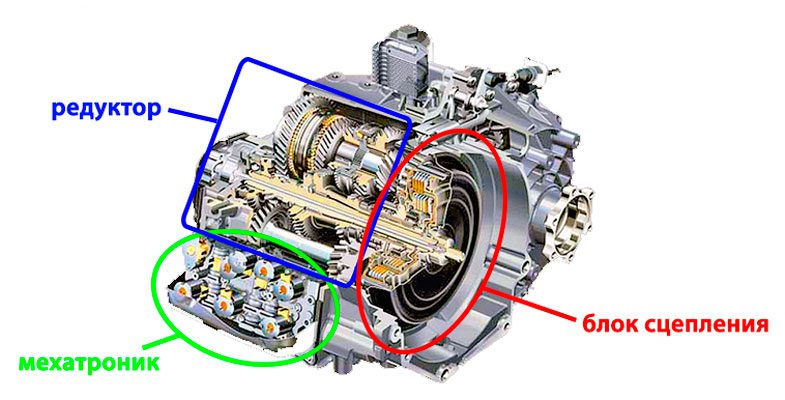
Li vir girêkên ku di nav gearboxê de hene:
- Destik. Bi çêker û guherîna yekeyê ve girêdayî, ev dikare bibe yek perçeyek bi rûkalek friction an çend dîskên wekhev. Pir caran, van hêmanan di nav sarincokê de ne, ku xebata yekîneyê stabîlîze dike, nahêle ew ji germê zêde bibe. Vebijarka bijarte an du qat bi bandortir tête hesibandin. Di vê guherînê de, dema ku yek gear tê de, koma duyemîn amade dibe ku leza dinê vemirîne.
- Beşa sereke qutiyek mekanîkî ya kevneşopî ye. Her çêker sêwiranên xwedan cuda bikar tîne. Mînakî, robotek ji marqeya Mercedes (Speedshift) di hundurê xwe de veguheztinek otomatîkî ya 7G-Tronic e. Cûdahiya tenê di navbera yekîneyan de ev e ku li şûna veguheztinek torque, kelûpelek bi çend dîskên lêdanê tê bikar anîn. Xemgîniya BMW nêzîkatiyek wusa heye. Qutiya wê ya SMG-ê li ser bingehek desta ya şeş-zû ye.
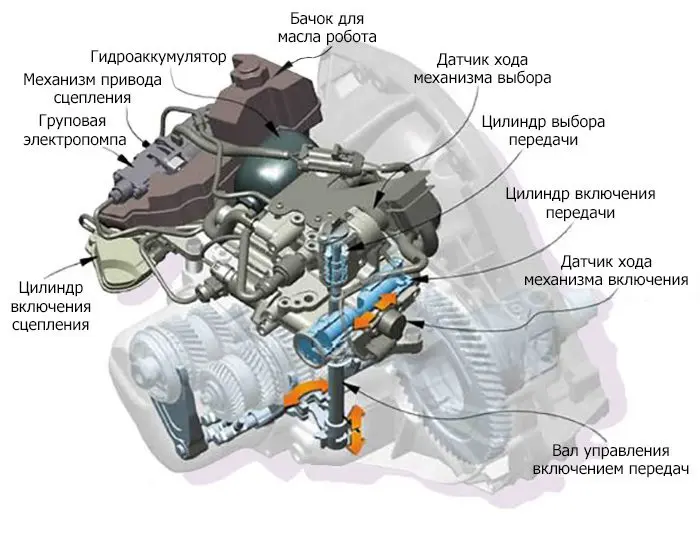
- Kişandin û ajotina veguhastinê. Du vebijark hene - bi ajokera elektrîkê an analogê hîdromekanîkî. Di rewşa yekem de, lepik ji hêla motorek elektrîkê ve tê kişandin, û di ya duyem de jî - ji hêla silindirên hîdrolîk ên bi valvulên EM. Ajokera elektrîkê ji hîdrolîk hêdî hêdî dixebite, lê ew ne hewceyê domandina zexta domdar a di xetê de, ya ku celeb elektro-hîdrolîk lê dixebite, hewce nake. Robotek hîdrolîk pir zûtir derbasî qonaxa din dibe (0,05 çirk li hember 0,5 çirk ji bo analogê elektrîkî). Gearboxek elektrîkî bi piranî li ser gerîdeyên butçeyê tê saz kirin, û qutiyek gearboxa hîdromekanîkî li ser otomobîlên werzişê yên prîmî tête saz kirin, ji ber ku leza guherîna gêrîk di wan de pir girîng e bêyî ku dabînkirina hêzê ya şafta ajotinê qut bike.

- Sensor Di robot de gelek beşên weha hene. Ew gelek parametreyên cihêreng ên veguhastinê dişopînin, ji bo nimûne, pozîsyona forkokan, şoreşên şaftên ketin û derketinê, ku di kîjan rewşê de kilîta hilbijêran girtî ye, germahiya sarkerê, û hwd. Hemî ev agahdarî bi cîhazê kontrola mekanîzmayê tête kirin.
- ECU yekîneyek mîkroprocesor e, ku tê de algorîtmayên cihêreng bi nîşanderên cihêreng ên ji sansor têne bername kirin. Ev yekîn bi yekeya sereke ya kontrolê ve girêdayî ye (ji wir daneyên li ser xebitandina motorê tê), û hem jî bi pergalên qefilandina çerxa elektronîkî (ABS an ESP) ve girêdayî ye.
- Actuators - silindirên hîdrolîk an motorên elektrîkê, li gorî guhertina qutiyê.
Taybetmendiyên xebata RKPP
Ji bo ku wesayît bi aramî dest pê bike, pêdivî ye ku ajokar pedala qulikê rast bikar bîne. Piştî ku wî alavê pêşîn an berevajî kir, ew hewce ye ku bi rengek hêsan pedalê berdide. Kengê ku ajokar ji mijûlbûna dîskan hes bike, ji ber ku wî pedal berdide, ew dikare li motorê vegerîne da ku tirimbêl nemîne. Bi vî rengî mekanîk dixebite.
Pêvajoyek wekhev di hevparê robotîk de pêk tê. Tenê di vê rewşê de jêhatîbûnek mezin ji ajokar nayê xwestin. Ew tenê hewce dike ku veguherîna qutiyê veguherîne rewşek guncan. Wesayît dê li gorî mîhengên yekeya kontrolê dest bi tevgerê bike.

Guhertina herî hêsan a yek-kuncî tenê mîna mekanîzmaya klasîk dixebite. Lêbelê, di heman demê de, pirsgirêkek heye - elektronîk nerîta qiloçê tomar nakin. Ger mirovek bikaribe destnîşan bike ka çiqas hêsan pêdivî ye ku pedalek di rewşek taybetî de serbest were berdan, wê hingê otomasyon hişktir dixebite, ji ber vê yekê tevgera gerîdeyê bi jerqên berbiçav ve girêdayî ye.
Ev yek bi taybetî di guherandinên bi ajokera elektrîkî ya çalakvanan de tête hîs kirin - dema ku alav tê guhertin, dê lepik di rewşek vekirî de be. Ev tê wateya şikestina herika tewra, ji ber ku tirimbêlê dest bi hêdîbûnê dike. Ji ber ku leza zivirandina çerxan jixwe kêmtir bi gerdana têkildar re lihevhatî ye, hengavek sivik çêdibe.
Ji bo vê pirsgirêkê çareseriyek nûjen pêşkeftina guherînek du qat bû. Nûnerê berbiçav ê veguherînek wusa Volkswagen DSG ye. Ka em ji nêz ve li taybetmendiyên wê bigerin.
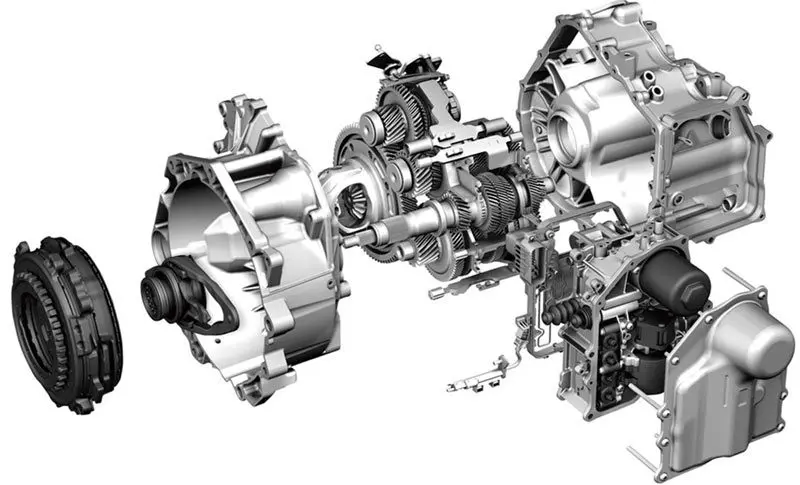
Taybetmendiyên gearboxa robotîk DSG
Kurtenav ji bo gearboxa guherîna rasterast radiweste. Bi rastî, ev du qutiyên mekanîzmayî ne ku di yek xanî de hatine saz kirin, lê digel yek xala girêdanê bi şaseya makîneyê. Her mekanîzmayek kêşeya xwe heye.
Taybetmendiya sereke ya vê guheztinê moda pêşbiryar e. Ango, dema ku şafta yekem bi kelûpelê ve tê xebitandin, elektronîkî jixwe gerdûneyên pêwendîdar bi hev ve girêdide (dema ku lezgîn dibe da ku gerdûn zêde bibe, dema ku dereng dibe - daket jêrê) ya şafta duyemîn. Çalakkerê sereke tenê hewce dike ku qulpek veqetîne û ya din jî girêbide. Hema ku ji beşa kontrolê îşaretek werdigire ku derbasî qonaxek din bibe, lepika xebatê vedibe, û ya duyemîn a ku gerdûnên wê jixwe meşandî yekser tê girêdan.
Ev sêwirana dihêle hûn dema ku lez bikin bêyî jerksên xurt siwar bibin. Pêşveçûna yekem a guherînek bijarte di 80-an de sedsala paşîn de xuya bû. Rast e, dûv re robotên bi darbek du qat li ser maşîneyên mîtîng û pêşbazan ên ku tê de leza û rastbûna guherîna gearê pir girîng in hatin saz kirin.
Ger em qutiya DSG-ê bi otomatîkek klasîk re bidin ber hev, wê hingê vebijarka yekem xwediyê bêtir avantajan e. Ya yekem, ji ber avahiya hêmanên sereke yên naskirî (çêker dikare her analogê mekanîkî amade bike bingeh bigire), qutiyek wusa dê di firotanê de erzantir be. Heman faktor li ser parastina yekeyê bandor dike - mekanîzma bêtir pêbawer û hêsantir têne tamîr kirin.
Vê yekê çêkir ku hilberîner li ser modelên budceya hilberên xwe veguheztinên nûjen saz bike. Ya duyemîn, gelek xwedan wesayîtên xwedan gearboxek wusa zêdebûna aboriya gerîdeyê li gorî modeleke wekhev, lê digel qutiyek gearboxê cuda diyar dikin.
Endezyarên xemgîniya VAG du guhertoyên veguhastina DSG pêş xistine. Yek ji wan etîketkirî ye 6, û ya din jî 7 e, ku bi hejmara gavên di qutîkê de têkildar e. Di heman demê de, otomatîkek şeş-leza zincîrek şil bikar tîne, û analogek heft-leza zincîrek hişk bikar tîne. Ji bo bêtir agahdarî li ser erênî û nebaşiyên qutiya DSG, û her weha çawa din modela DSG 6 ji guherîna heftemîn cuda ye, binihêrin gotara cuda.
Alîkarî û kêmasiyan
Cûreyek veguheztina ku tête hesibandin hem aliyên erênî hem jî neyînî hene. Awantajên qutiyê ev in:
- Veguheztinek wusa dikare di teniştê de bi yekeya hêzê ya hema hema her hêzê re were bikar anîn;
- Bi nisbeten û makîneyek otomatîk ve, versiyona robotkî erzantir e, her çend ev yek pêşkeftinek nûjen be jî;
- Robot ji veguhastinên otomatîk ên din pêbawertir in;
- Ji ber wekheviya navxweyî ya bi mekanîzmayê, hêsantir e ku hûn pisporek bibînin ku dê sererastkirina yekeyê hilgire;
- Guhertina bihurîn a bi bandortir destûrê dide karanîna hêza motorê bêyî ku di mezaxtina sotemeniyê de krîtîk zêde bibe;
- Bi çêtirkirina karîgeriyê, makîne madeyên kêm zirarê dide derdorê.
Tevî avantajên diyar ên li ser veguhastinên otomatîk ên din, robot xwedan çend kêmasiyên girîng e:
- Ger erebe bi robotek dîsk-yek were stendin, wê hingê ji rêwîtiya li ser wesaîtek weha rehet nayê gotin. Dema ku gerîngehan diguherin, dê hebên berbiçav hebin, wekî ku ajokar ji nişka ve pedala qiloçê davêje ser mekanîkan.
- Pir caran, kelûmêl (tevgera kêmtir nerm) û tevger di yekeyê de têk diçin. Ev sererastkirina veguhastinan tevlihev dike, ji ber ku çavkaniyek wan a piçûk a xebatê heye (bi qasî 100 hezar kîlometre). Kêm caran servos têne tamîr kirin û mekanîzmayek nû biha ye.
- Wekî ku ji kincê, çavkaniya dîskê jî pir piçûk e - nêzîkî 60 hezar. Wekî din, hema hema di nîvê çavkaniyê de hewce ye ku "girêdana" qutiyê di bin şertê rûxanê yê perçeyan de pêk were.
- Heke em qala guherandina bijarte ya DSG bikin, wê hingê ew ji ber ku ji bo leza guheztina kêm kêm bû (bi saya vê yekê, erebe ewqas sist nake) pêbawertir bû. Digel vê yekê, hîna girêdan di wan de dikişîne.
Li gorî faktorên navnîşkirî, em dikarin encamê bigirin ku heya pêbawerî û jiyana xebatê têkildar in, mekanîzmayek hîn wekhev nîne. Ger giranî li ser rehetiya herî zêde were danîn, wê hingê çêtir e ku meriv variatorek hilbijêre (xusûsiyeta wê çi ye, bixwîne vir) Pêdivî ye ku meriv ji bîr neke ku veguhastinek wusa dê derfetek ji bo teserûfa sotemeniyê peyda neke.
Di encamê de, em berhevdanek vîdyoyek kurt a celebên sereke yên veguhastinê - erênî û neyînîyên wan:

Pirs û bersivan:
Ferqa di navbera otomatê û robot de çi ye? Veguheztina otomatîkî ji ber veguhezkarê torkê dixebite (di nav çîpekê de bi flywheel re hevgirtinek hişk tune), û robot analogek mekanîka ye, tenê lez û bez bixweber têne guheztin.
Meriv çawa li ser qutiyek robot gemaran biguhezîne? Prensîba ajotina robot bi ajotina makîneyek otomatîkî re wekhev e: moda xwestinê li ser hilbijêrê tê hilbijartin, û leza motorê bi pedala gazê ve tê rêve kirin. Leza dê bixweber biguhere.
Di erebeya bi robot de çend pedal hene? Her çend robot ji hêla avahîsaziyê ve dişibihe mekanîkayê jî, klûb bixweber ji firarê vediqete, ji ber vê yekê otomobîlek bi veguheztina robotîkî du pedal hene (gaz û fren).
Meriv çawa gerîdeyek bi qutiya robotê bi rêkûpêk park dike? Pêdivî ye ku modela Ewropî di moda A de an jî di navgîniya berevajî de were park kirin. Ger otomobîl Amerîkî ye, wê hingê hilbijêr moda R heye.
Yek şîrove
David
Silav, ez hewceyê alîkariyê ne, 203 kopî ketin moda acîl, ez dikarim çi bikim?